
人类手腕绕前臂轴向两个方向旋转的能力对许多日常活动至关重要。这种旋转被限制在大约[-90°,90°]的范围内,限制了手腕执行复杂操作任务的能力。例如,当我们用钥匙开门或锁门时,我们的手腕会进行大幅度的旋转运动。当我们拧时,手腕需要旋转180°几次。
然而,由于旋转角度有限,手需要离开钥匙或螺丝刀几次才能完成整个工作过程。为了在单个执行器中实现大的旋转比,浙江大学的研究团队在Kresling折纸单元的基础上,提出了一种具有双向扭转能力的腕式磁气混合驱动软执行器。
该团队在《生化系统》杂志上发表了他们的研究结果。
为了全面了解和预测该驱动器的行为,研究人员开发了运动学和准静态力学分析模型。这些模型有助于详细检查执行器的机械性能。
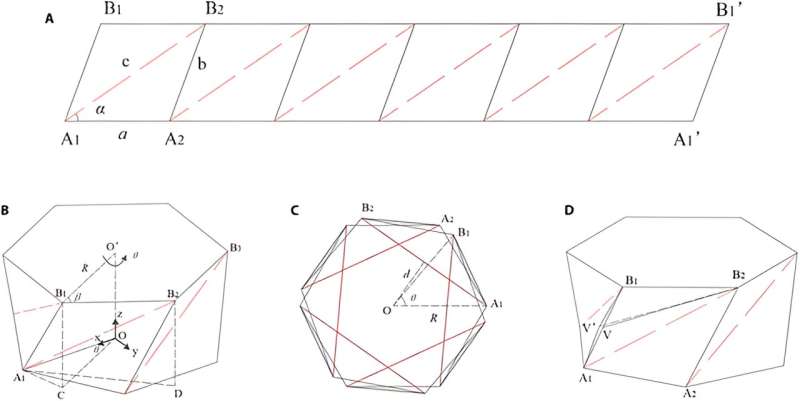
为了实现双向弯曲,研究人员通过在每个平行四边形中添加折痕来重新设计Kresling折痕图。Kresling图案的平板由聚氯乙烯制成;内腔是密闭的,在顶板上放置了一块磁铁。
通过软作动器的设计,实现了磁气混合驱动的双向扭转。实验验证了该驱动方法的有效性,证明了该驱动器能够保持三种稳态,并具有双向扭转变形的能力。
首先,在顶板的平面上施加一个外部磁场到执行器上,产生一个面内扭矩。然后对执行器内腔进行抽真空。真空压力和扭矩的共同作用,直到它完全折叠。当调整磁场和内压时,执行机构可返回初始配置或反向转动。
为了验证软执行器的准静态特性,研究人员进行了一系列实验,包括压缩实验、驱动实验和疲劳特性实验。
这种执行器的独特设计使其能够通过双向扭转运动实现大的旋转角度,只需使用单个模块。对致动器设计的进一步探索表明,通过增加截面多边形的边数(n),可以开发出能够实现更大旋转角度的致动器。六侧(n=6)作动器实现了239.5°的旋转角度,其旋转比超过277°,约为其他文献报道的最大旋转比的两倍。
与人类手腕相比,具有优越扭转运动能力的致动器将在软机器人的各种复杂操作任务中具有广阔的应用前景。软执行器的双向扭转运动将提高软机器人的灵活性和可操作性。
更多信息:闫旭等,一种腕式磁力-气动混合驱动的双向扭转软执行器,半机械人和仿生系统(2024)。DOI: 10.34133 / cbsystems.0111期刊信息:Cyborg and Bionic Systems由北京理工大学出版社有限公司提供引文:一种具有双向扭转的磁气混合驱动软执行器(2024,4月17日)检索自https://techxplore.com/news/2024-04-magneto-pneumatic-hybrid-driven-soft.html。除为私人学习或研究目的而进行的任何公平交易外,未经书面许可,不得转载任何部分。内容仅供参考之用。






