杜克大学的工程师们开发了一种可伸缩的软表面,它可以不断地自我重塑,以模仿自然界中的物体。依靠电磁驱动、机械建模和机器学习形成新的配置,表面甚至可以学习适应障碍,如破碎的元素、意外的约束或变化的环境。
这项研究于9月21日在线发表在《自然》杂志上。
杜克大学机械工程和材料科学助理教授倪晓悦说:“我们的动机是控制工程对象的材料属性或机械行为,这可能对软机器人、增强现实、仿生材料和特定学科可穿戴设备等应用很有用。”“我们专注于对尚未预先确定的物质的形状进行工程设计,这是一项相当艰巨的任务,特别是对于软材料。”
看着这轻薄、柔韧的材料自学模仿海浪和实时弯曲的手掌。依靠电磁驱动、机械建模和机器学习形成新的结构,表面甚至可以学习适应障碍,如破碎的元素,意外的co 压力或不断变化的环境。信贷:维罗 杜克大学的尼克·科赫
根据Ni的说法,以前关于物质变形的工作通常没有被编程;而是被编程了。也就是说,配备了设计的主动元素的软表面可以在几种形状之间变换形状,就像折纸一样,在光、热或其他刺激触发下做出反应。相比之下,倪和她的实验室想要创造一种更可控的东西,可以随时变形和重新配置成任何物理上可能的形状。
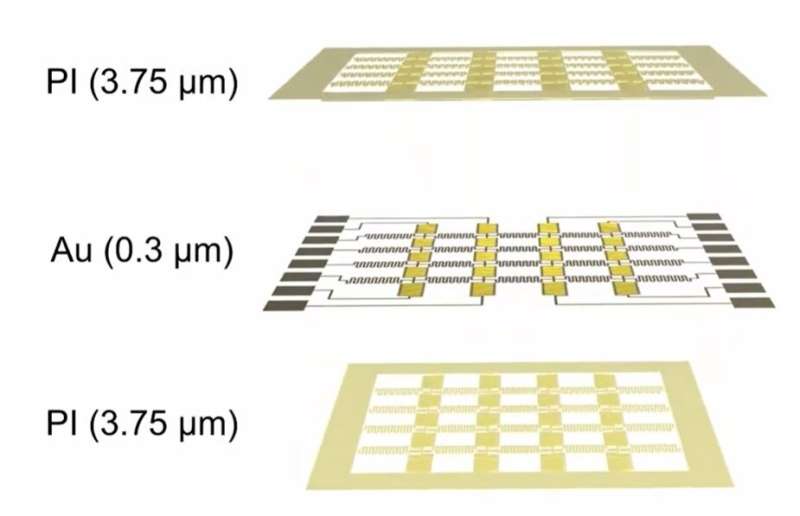
为了创造这样的表面,研究人员首先布置了一个蛇形梁网格,它由一层薄薄的聚合物包裹的薄薄的金制成。单个光束只有8微米厚——大约是棉纤维的厚度——不到一毫米宽。光束的重量使磁力容易而迅速地使它们变形。
为了产生局部力,表面被置于低水平的静态磁场中。电压的变化会沿着黄金电网产生复杂但容易预测的电流,驱动电网的平面外位移。
“这是第一个速度足够快的人造软表面,可以精确地模拟自然界中连续的形状变化过程,”Ni说。“一个关键的进步是结构设计,使电气输入和结果形状之间具有不同寻常的线性关系,这使得很容易找出如何施加电压来实现各种各样的目标形状。”
新的“超表面”展示了广泛的变形和模仿技能。它创造了凸起,并在表面上移动,就像一只猫试图从毯子下找到出路,振荡的波模式,以及令人信服的复制液滴滴在固体表面上的扑通扑通。它可以在任何需要的速度或加速度下产生这些形状和行为,这意味着它可以以慢镜头或快镜头重新想象被困的猫或水滴。
通过摄像头监控变形的表面,柔术演员的表面也可以学会自己重建形状和图案。通过缓慢地调整施加的电压,一个学习算法接受3D成像反馈,并计算出不同的输入对超表面形状的影响。
在这篇论文中,一个有16个黑点的手掌在摄像机下慢慢移动,其表面完美地反映了这个动作。
倪说:“这个控制系统不需要了解任何材料的物理特性,它只需要迈出一小步,观察它是否正在接近目标。”“目前,形成一个新形状大约需要两分钟,但我们希望最终改进反馈系统和学习算法,达到接近实时的程度。”
由于表面通过试验和错误自学移动,它也可以适应损伤、意外的物理约束或环境变化。在一项实验中,尽管它的一根横梁被切断,但它很快学会了模仿一个鼓胀的土堆。在另一种情况下,尽管在网格的一个节点上附加了重量,它仍然能够模仿出类似的形状。
有许多直接的机会来扩展软表面的规模和配置。例如,一个表面阵列可以缩放到触摸屏的大小。或者,更高精度的制造技术可以将尺寸缩小到一毫米,使其更适合于生物医学应用。
展望未来,Ni希望创建具有集成形状传感功能的机器人超表面,对自然界中复杂的动态表面进行实时形状模拟,如水波纹、鱼鳍或人脸。该实验室还可能研究在原型机上嵌入更多组件,如机载电源、传感器、计算资源或无线通信能力。
Ni说:“随着对可编程和机器人材料的追求,我们预计未来的材料将能够自我改变,以动态和交互的方式服务功能。”“这些材料可以感知和感知来自用户的需求或信息,并根据其特定性能的实时需求进行转换和适应,就像《超能陆战队》中的微型机器人一样。这种软表面可以应用于远程操作机器人、动态3D显示、伪装、外骨骼或其他智能功能表面,可以在恶劣、不可预测的环境中工作。”