四足机器人,也被称为四足机器人,具有优势的特点,包括能够在具有挑战性的地形上快速行走,并保持低重心。一些四条腿的机器人也可以操纵周围的物体,但这通常是通过安装在机器人顶部的臂状结构来实现的,而不是它们用来行走的四肢。
卡内基梅隆大学(Carnegie Mellon University)、华盛顿大学(University of Washington)和谷歌深度思维(Google DeepMind)的研究人员最近开发了一种创新的四足机器人,它可以用和走路一样的腿捡起并处理附近的物体。在预印本服务器arXiv上发表的一篇论文中介绍了这个机器人系统,研究人员发现它非常灵巧,用途广泛,能够成功地完成各种物体操作任务。
“四足机器人是一种多功能智能体,能够在复杂环境中进行运动和操作,”CMU安全人工智能实验室副教授、本文通讯作者丁钊告诉Tech Xplore。“传统的设计通常包括顶部安装的手臂来完成操作任务。然而,这些配置可能会限制机器人的有效载荷、稳定性和效率。我们在自然界中看不到背上有胳膊的狗,”赵说。
由赵和他的同事设计的新机器人LocoMan解决了大多数先前开发的四足机器人的局限性。这种新型机器人具有独特的形态,使其能够适应四肢的排列,从而可以以不同的方式操纵物体。
其独特的结构和配置允许LocoMan在复杂的环境中执行6D姿势操作,包括密闭空间。该机器人采用loco -机械手,这是一种新开发的可伸缩、低成本、轻量化的三自由度模块化机械手。
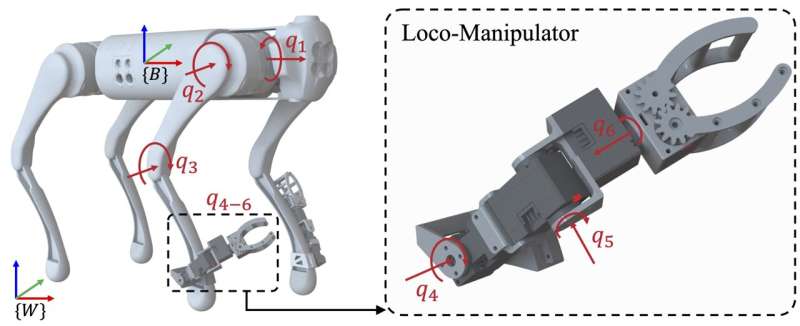
loco -机械手相当容易制造,因此也可以大规模部署。研究人员在机器人的前小腿上集成了两个local -manipulators,从而确保这些小腿也可以充当手。
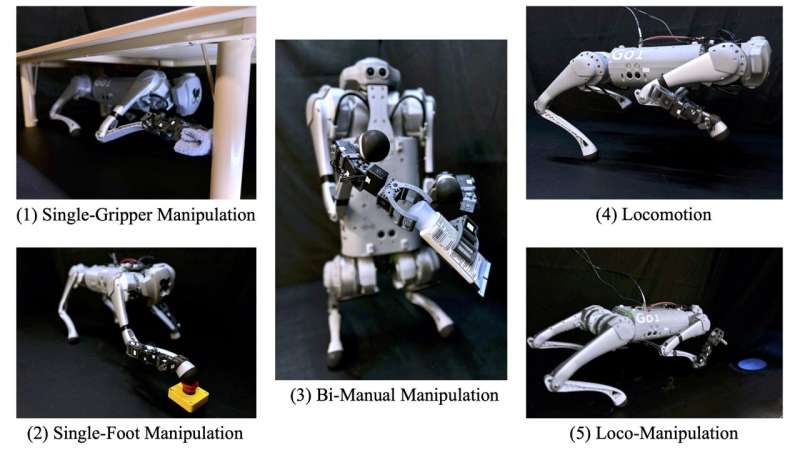
“LocoMan是一款多功能四足机器人,由一个标准的四足机器人和两个机械手组成,”赵教授实验室的一年级博士生林昌义解释说。“它在全面的全身控制(WBC)框架下运行,促进五种操作模式的无缝过渡:单爪操作、单足操作、双手操作、运动和局部操作。通过在机器人小腿上安装两个机械手,并整合其原始腿,我们实现了6D姿势操纵。”
赵和他的同事在一系列现实世界的实验中评估了他们的机器人,发现它非常灵巧。除了成本低、结构紧凑外,LocoMan还可以处理复杂的操作任务,包括开门、将电子设备插入插座和在密闭空间中拾取物体。
“我们的研究为智能机器人提供了一个不同的视角。我们希望提供一种互补的机器人,它可以做人类可能不想做的事情,而不是复制具有相似形态的人类。”“LocoMan使四足机器人能够在狭窄的空间内执行复杂的操作任务。”
在这篇最近的论文中介绍的新机器人可以很快在更广泛的环境中进行测试,并最终用于解决现实世界的问题。在接下来的研究中,赵和他的同事计划使用尖端的计算机视觉和机器学习算法进一步提高机器人的能力。
赵补充说:“视觉语言模型的集成有望彻底改变LocoMan生成动作的方式。”“这可以通过解释对环境的视觉感知和处理人类的口头指令来实现,从而实现更直观、更无缝的交互。”
更多信息:林昌义等人,机车:推进多功能四足灵巧与轻型位置操纵器,arXiv(2024)。期刊信息:arXiv .2403.18197
©2024 Science X Network
引用:一个灵巧的四足机器人,可以同时行走和处理物体(2024年4月19日) 作品受版权保护。除为私人学习或研究目的而进行的任何公平交易外,未经书面许可,不得转载任何部分。的有限公司 内容仅供参考之用。