创造机器人来安全地救助灾民是一个挑战;利用这种材料的柔软性来执行柔性机器人控制是另一个问题。最近,在灾区使用柔韧的软材料与人类合作和工作引起了人们的广泛关注。然而,控制软动力学的实际应用仍然是一个重大的挑战。
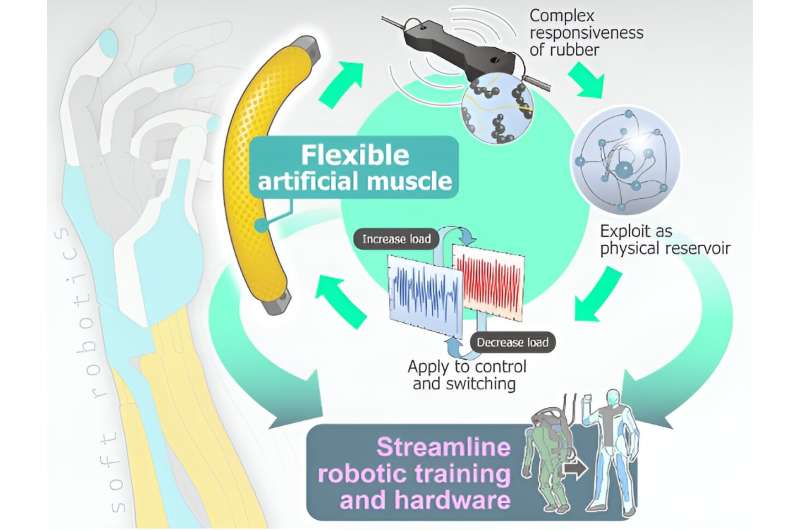
京都大学与东京大学和普利司通公司合作,开发了一种控制气动人造肌肉的方法,这是一种柔软的机器人执行器。这些驱动部件丰富的动力学特性可以作为一种计算资源加以利用。这项研究发表在《高级科学》杂志上。
京都大学信息学研究生院的Nozomi Akashi解释说:“我们已经展示了执行器自主产生各种动态的能力,包括节奏模式和混乱。”
传统上,图案是通过在机器人外部附加振荡器来产生的,从而实现运动和重复运动。然而,这些振荡器应该从机器人中移除,以保持它们的柔软性。Akashi的团队解决了这个难题,以发挥软机器人的潜力。
东京大学信息科学与技术研究生院的Kohei Nakajima说:“此外,改变模式的分叉结构可以嵌入机器人驱动器本身。”
研究结果表明,机器人可以在学习数据之外产生不同性质的模式,为开发适应性更强、运动更灵活的机器人铺平了道路。
Akashi总结道:“这可以简化硬件和软件开发过程,使其更高效。”
更多信息:Nozomi Akashi等人,将分岔嵌入气动人造肌肉,Advanced Science(2024)。DOI: 10.1002 / advs.202304402期刊信息:京都大学提供的Advanced Science引文:内置仿生计算:研究人员开发控制气动人造肌肉的方法(2024,4月26日)检索自2024年4月26日https://techxplore.com/news/2024-04-built-bionic-method-pneumatic-artificial.html此文档受版权保护。除为私人学习或研究目的而进行的任何公平交易外,未经书面许可,不得转载任何部分。内容仅供参考之用。